2019 Design Day
2019 Design Day Slideshow
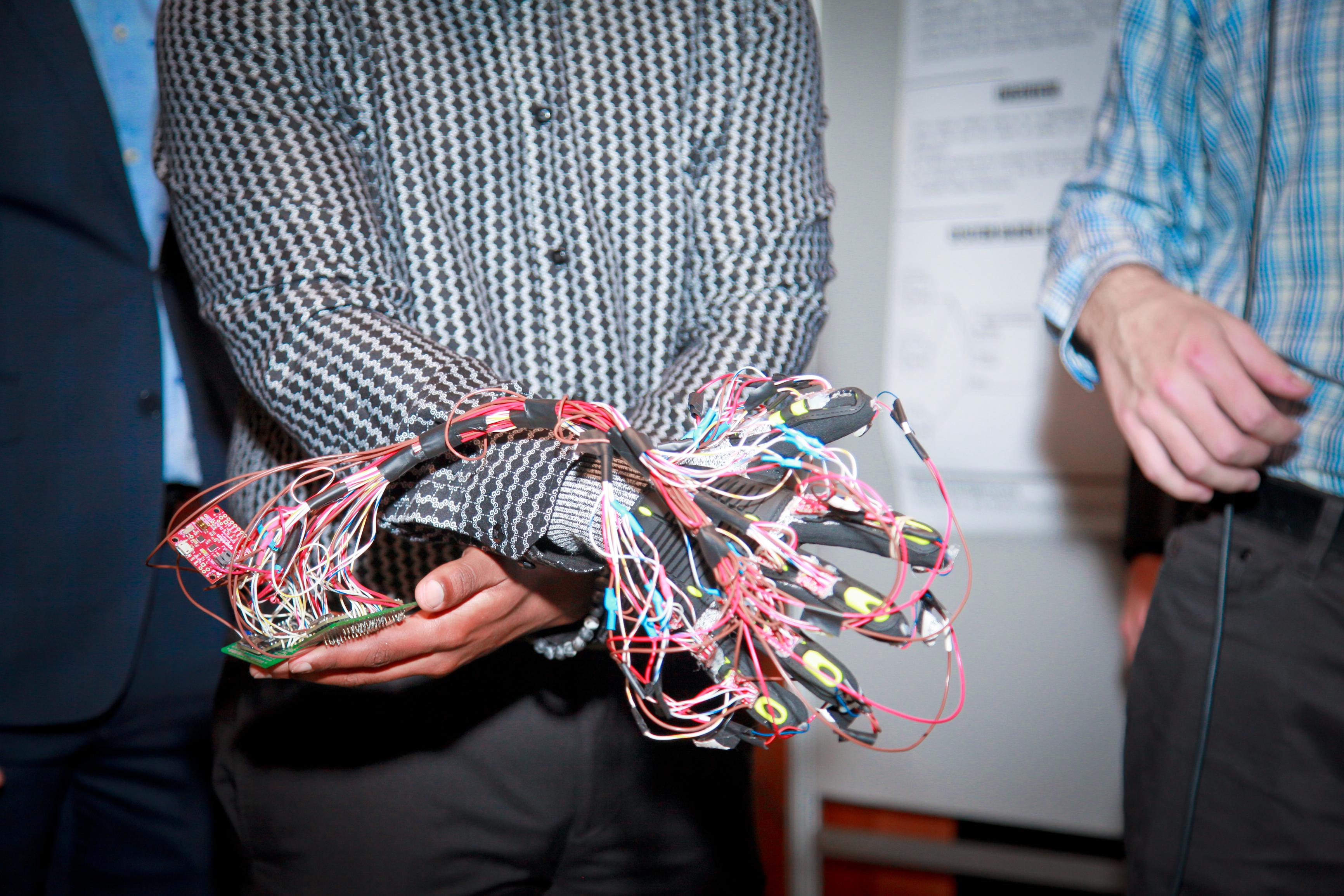
Close up of Design Day project.
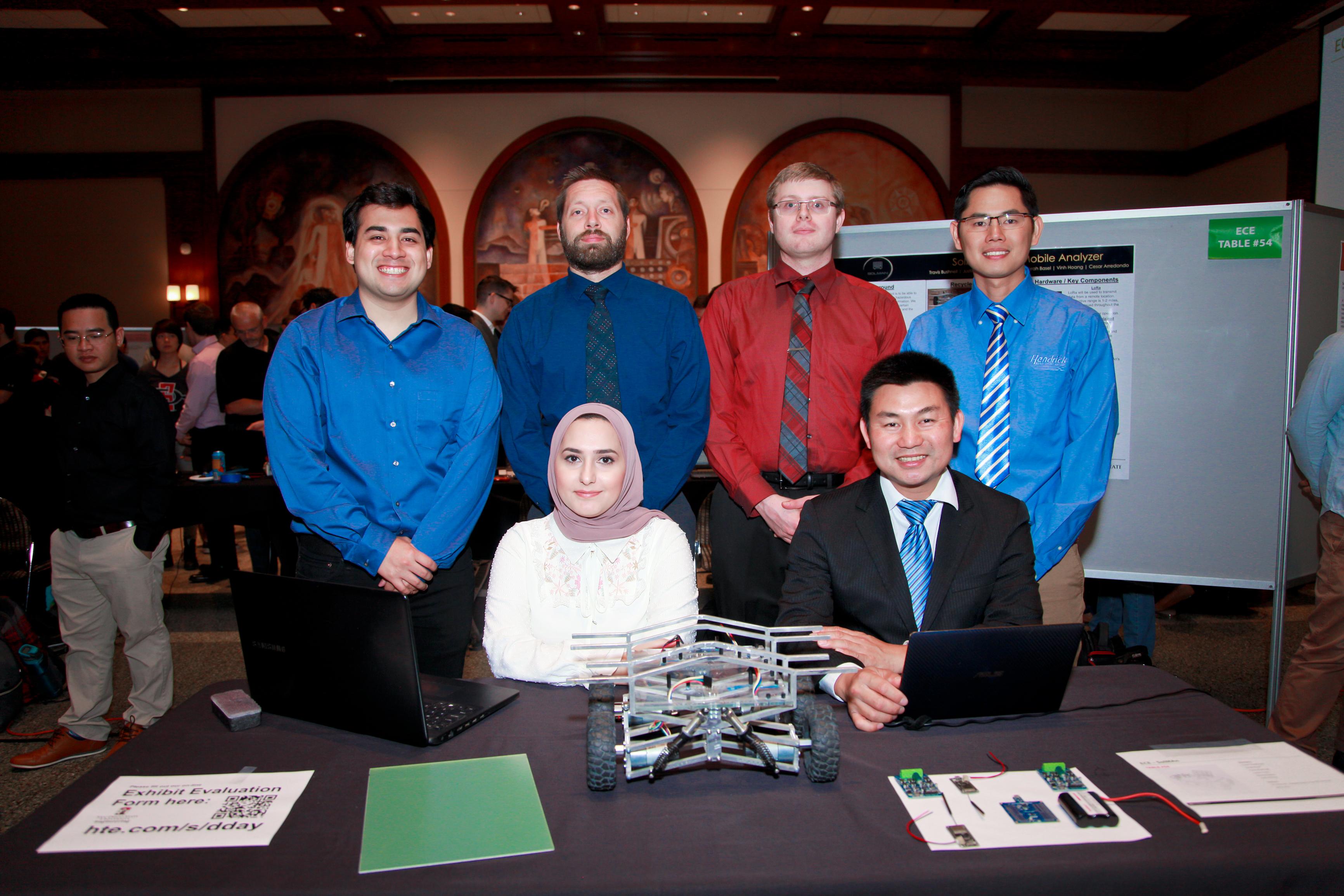
Solar Mobile Analyzer: A battery powered semi-mobile data collecting platform able to wirelessly transmit data over distance and utilizing solar power for charging and stationary operations purposes.
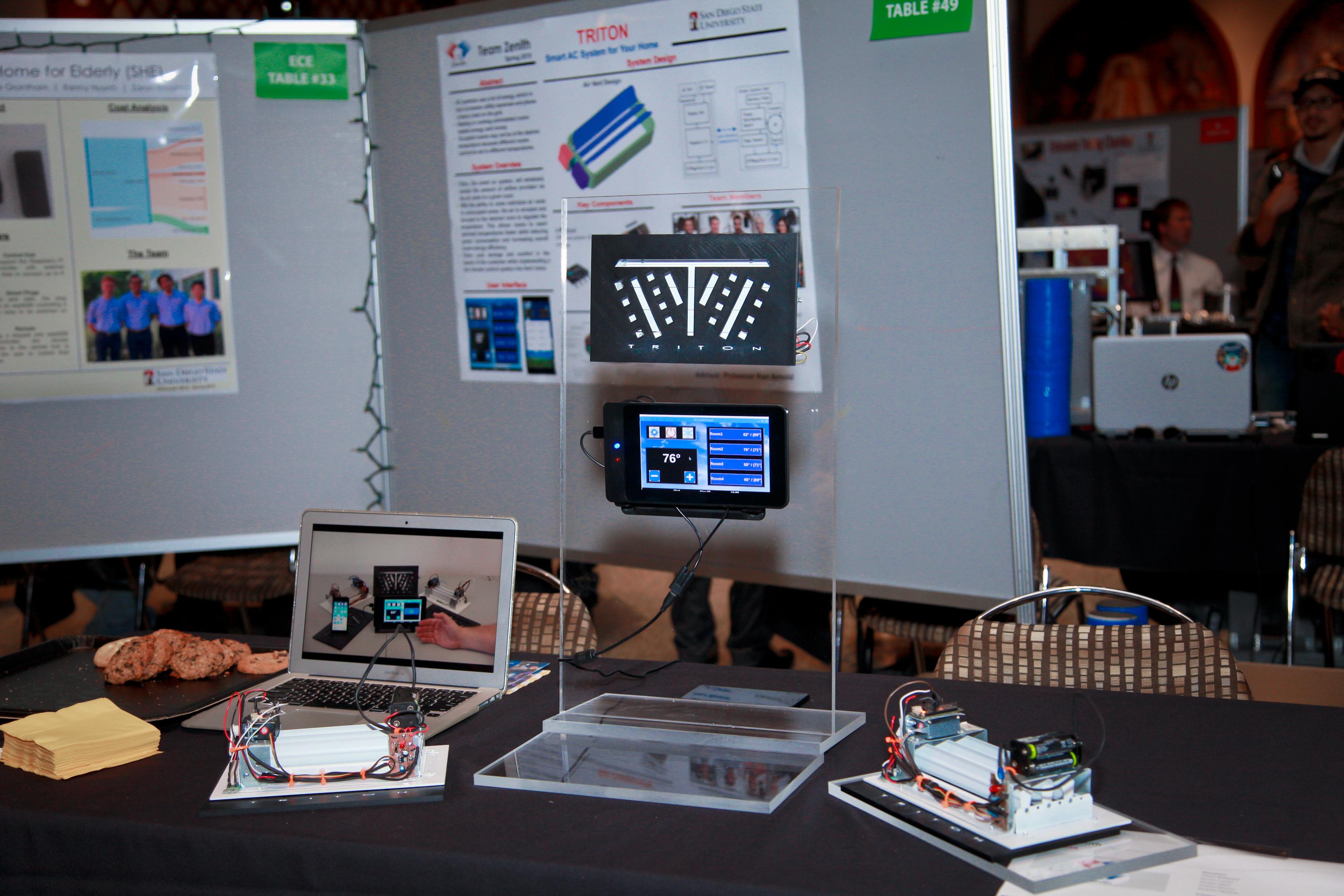
Triton: An easy to install system that reduces power consumption and cost. Triton controls the airflow through the vents, enabling independent temperature control in each room. A custom thermostat wirelessly communicates to the air vent’s microcontroller for temperature readings and servo manipulation. By focusing air to desired rooms, the ac unit shuts off sooner and reduces power consumption.
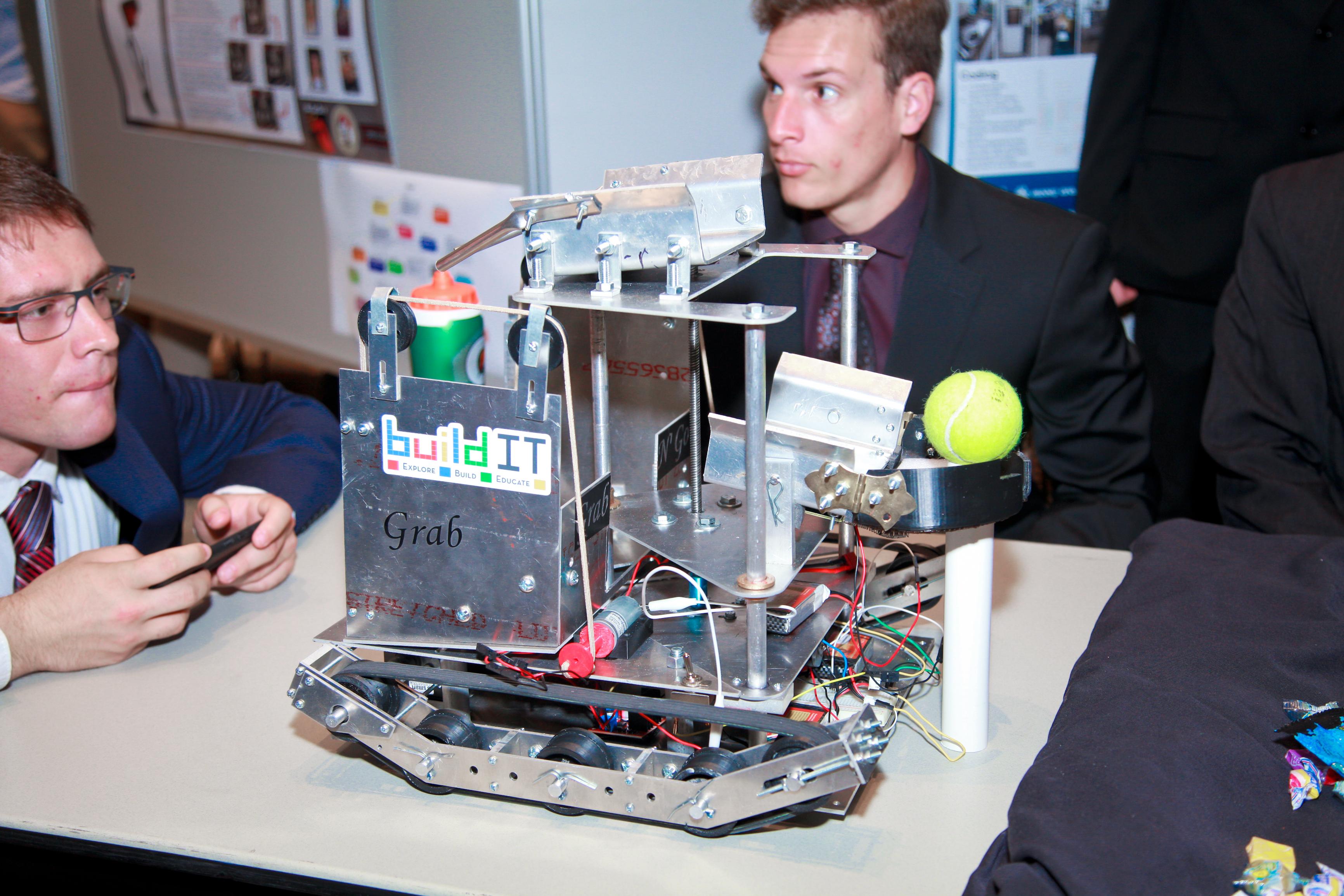
The Grab and Go team designed and fabricated a remote-controlled robot to compete in the ASME competition called “The Pick-and-Place Race.” The robot’s primary objective is to traverse a predefined course, collect as many balls as possible, and place them in a collection area. System design features include a Bluetooth to cell phone controller, a tracked wheel electric propulsion system and a motorized capture system.
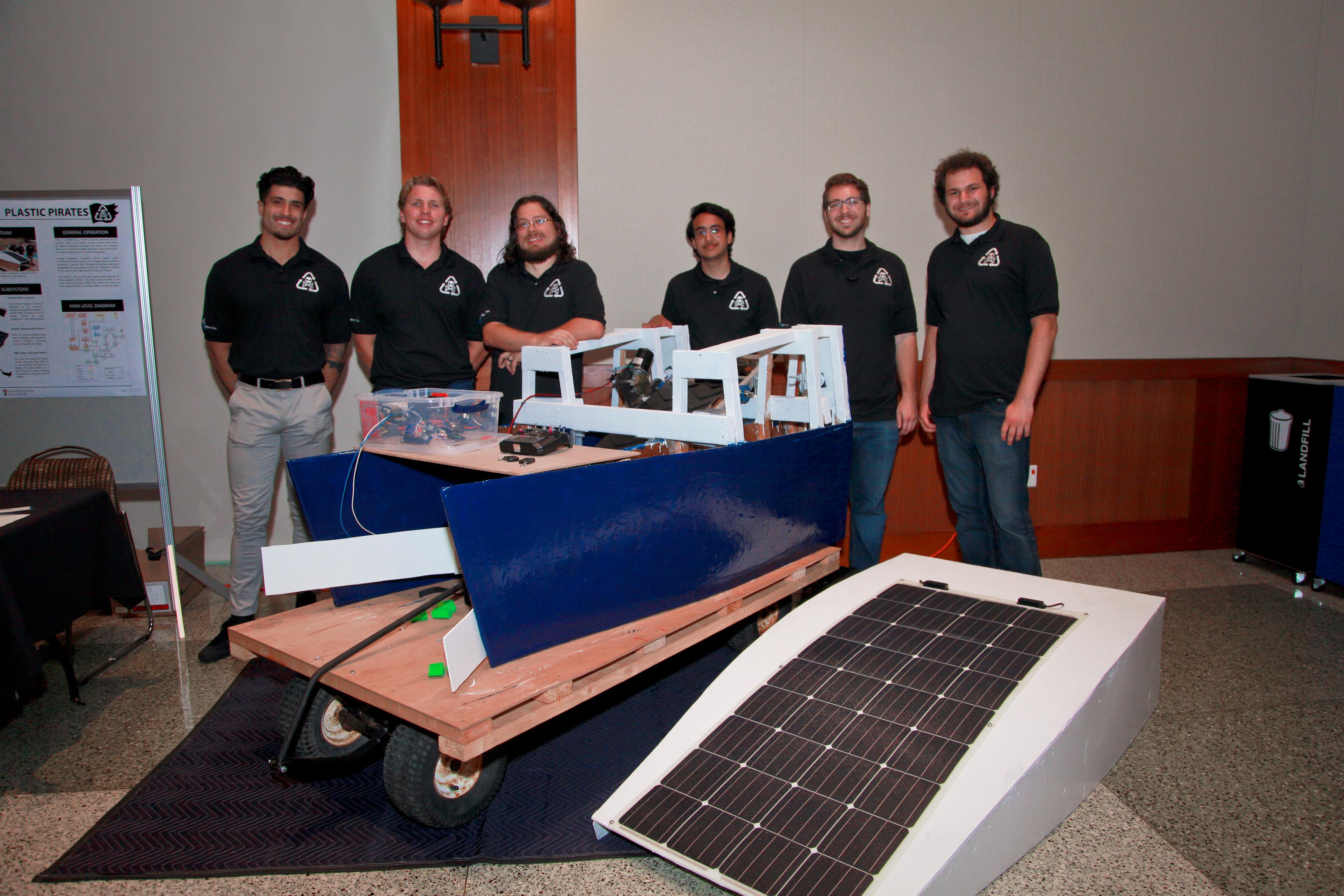
Floating Robot for Eliminating Ocean Debris: The Plastic Pirates Team has designed, constructed, and tested a small-scale, solar- powered, semi-autonomous marine robot with functionality to collect plastic garbage in marine environments. Our robot is a prototype of Clear Blue Sea’s Floating Robot for Eliminating Debris, which is being developed to cleanse the oceans of plastic pollution.
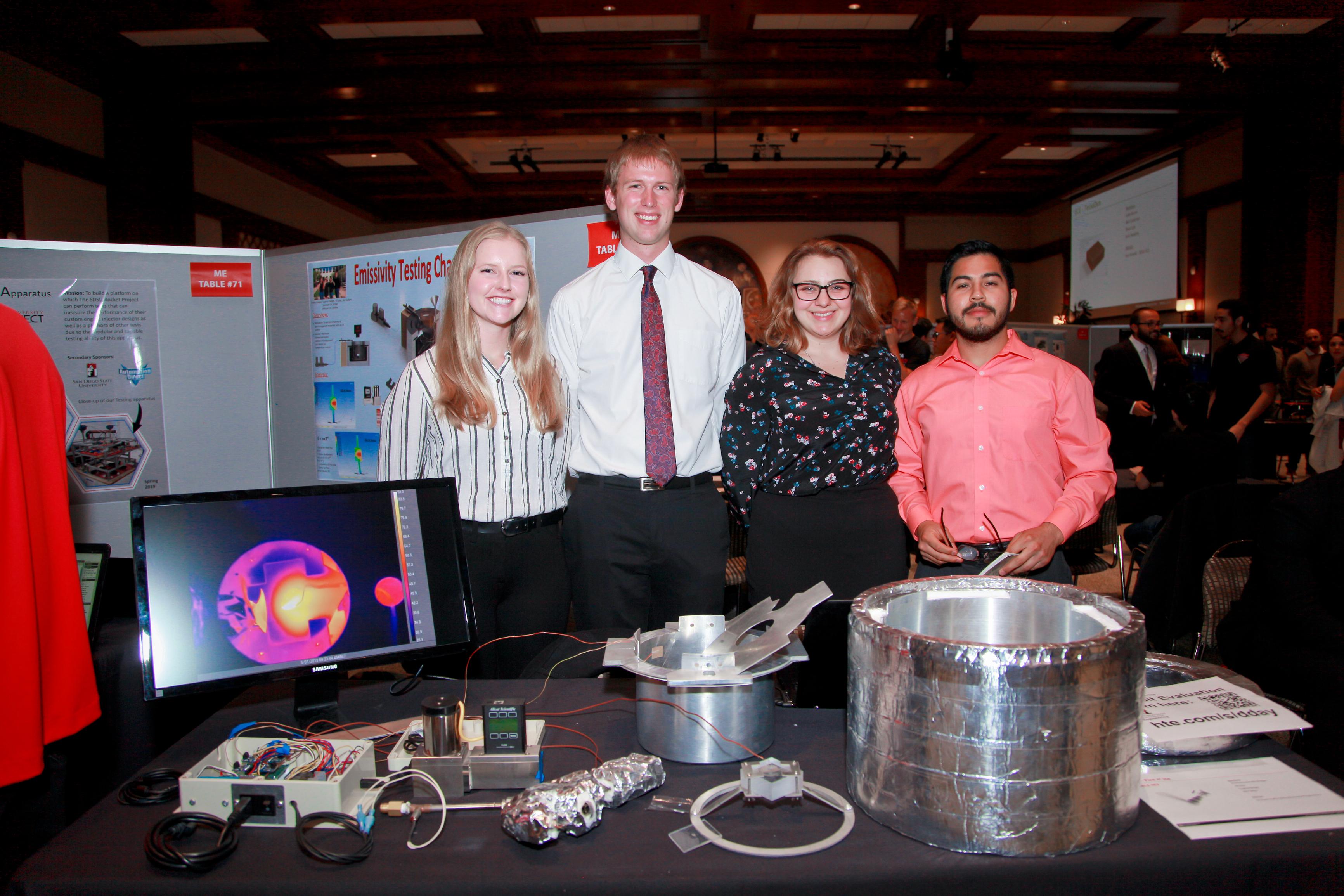
Emissivity Testing Chamber: Dr. Miller studies emissivity of semi-transparent materials but has issues with background interference. A sub-freezing, low-emitting housing was constructed to reduce this interference and noise in the data. The walls are kept at low temperatures which are monitored by sensors, and the specimen can achieve and maintain temperatures up to 350°C using a controlled heating system.
The Grab and Go team designed and fabricated a remote-controlled robot to compete in the ASME competition called “The Pick-and-Place Race.” The robot’s primary objective is to traverse a predefined course, collect as many balls as possible, and place them in a collection area. System design features include a Bluetooth to cell phone controller, a tracked wheel electric propulsion system and a motorized capture system.

Miriti Alpha - Ethiopian Teff Harvester: The Ruff n’ Teff team designed and fabricated an engine powered Teff grass harvesting device that aims to provide a safer and more efficient alternative to the traditional sickle currently used by Ethiopian farmers.

County Live Well Campus - Rosecrans St and Pacific Highway: Potential project plans that redevelops land that currently contains the Human and Health Service Agency Office of Vital Records into a 220,000 square foot multi-story building and associated parking structure for its employees and patients.

Material Containment System for Manufacturing Applications: The Off the Hooke team designed, fabricated and tested an electro-mechanical system to support a metal component manufacturing company. The system was designed to integrate directly into an existing high-volume production line and process with a primary objective of safely and efficiently collecting and containing extruded material.

Montezuma Mobility’s Electric Drive Prototype: For the 2018-19 Senior Design track, 8 students have come together to produce an electric vehicle that fulfills the standard known as MM20/20: Montezuma Mobility will build an approachable, functioning electric bicycle that has a minimum range of 20 miles and can reach 20 miles per hour.
Close up of Design Day project.